Research Projects
Humanoid Loco-Manipulation for Tote Logistics
- Proposed a hierarchical learning and control paradigm for humanoid loco-manipulation that effectively reduces the complexity of long-horizon tasks through task decomposition
- Developed a hybrid inverse dynamics control framework with gravity compensation for dual-arm manipulation
[view more]
Perceptive Locomotion with Precise Foot Placement for Quadruped Robot
- Introduced a versatile trajectory optimization method and real-time perception to generate dynamic motions
- Established perception pipeline for environment perception, segmentation, and representation
[view more] [video]
Humanoid Robot - Upper Torso
- Introduced a physical structure of the robot torso with great compliance by using 3D printed TPU for the intervertebral discs of the spine
- Built the actuating system with parallel manipulators for the robot torso to achieve 3‐DoF rotational movement
[view more]

Portable EEG Device for Auditory Closed-Loop Stimulation Study
- Developed a portable single-channel EEG device with audio-stimulation for studying auditory closed-loop brain stimulation
- Used the device to monitor the neural signal during overnight sleep
- Collected the neural data for training sleep stage classifier
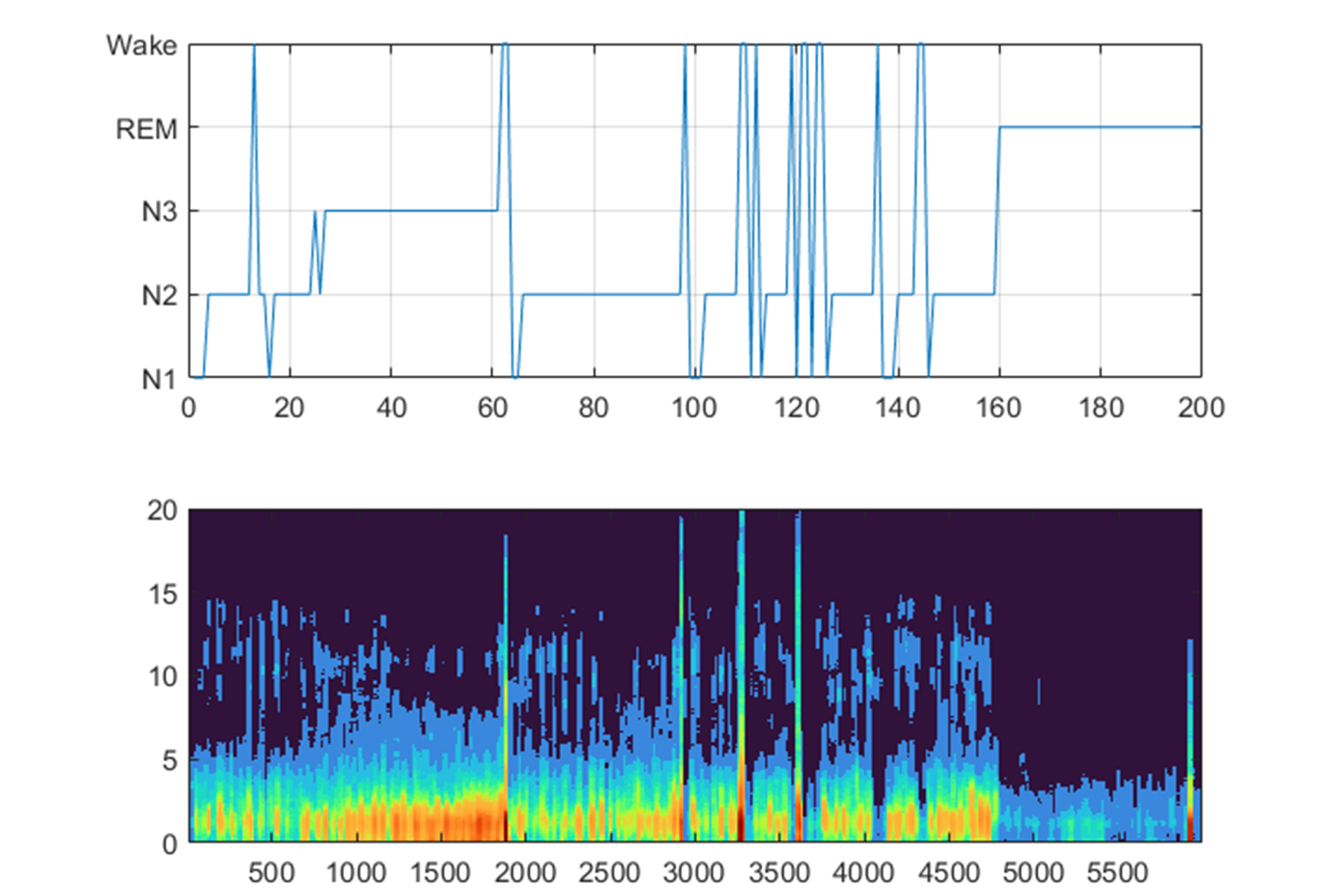
Deep Learning Model for Sleep Stage Scoring based on Raw Single-Channel EEG
- Proposed an efficient deep learning model and a novel technique to effectively extract time‐invariant features for sequence residual learning in down‐streaming modules based on raw single-channel EEG
[code]
Class Projects
Dynamical Modeling of Serial Arm Robot
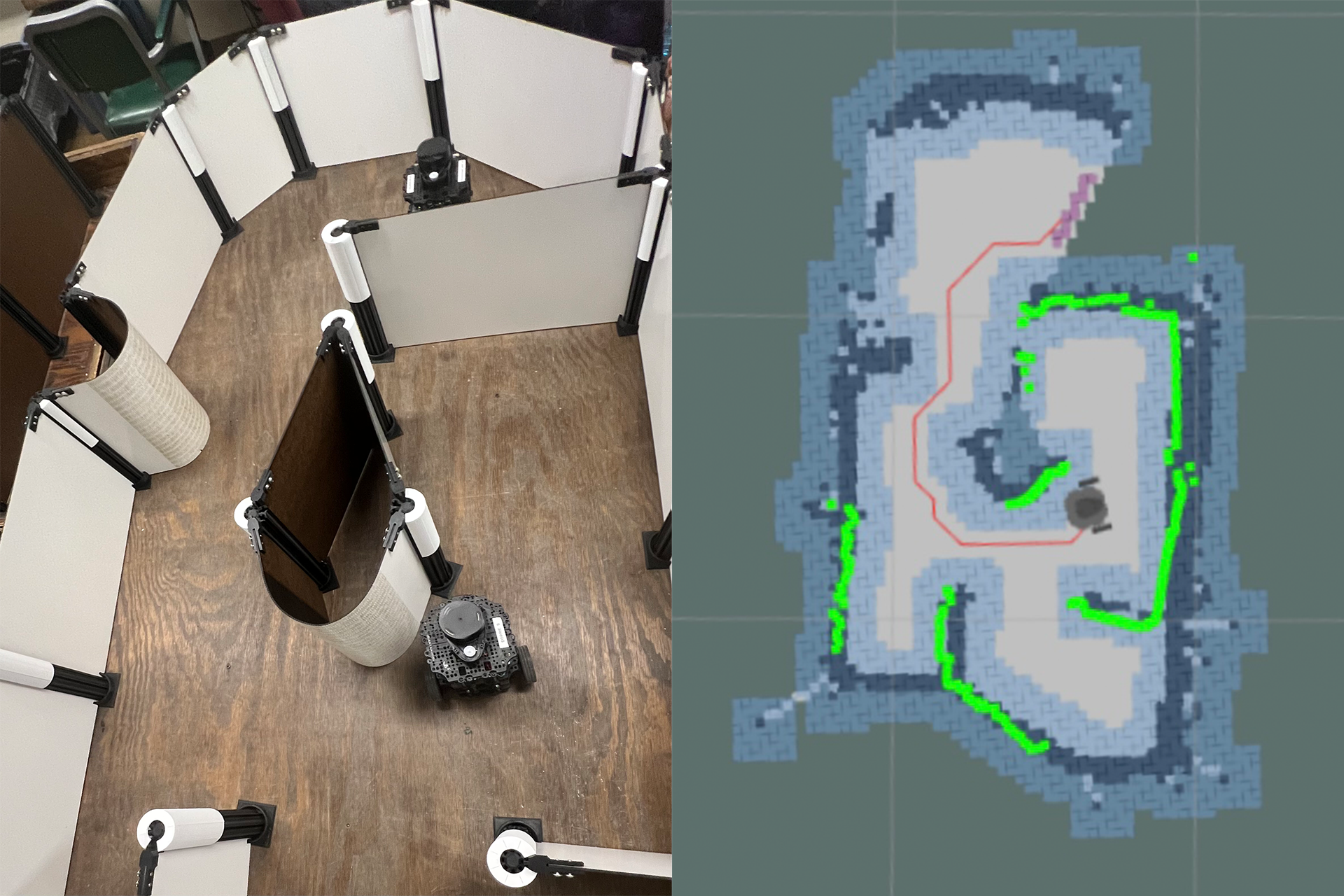
Autonomous Path Planning and Navigation Robot
Vision Based 3‐DoF Manipulator [video]
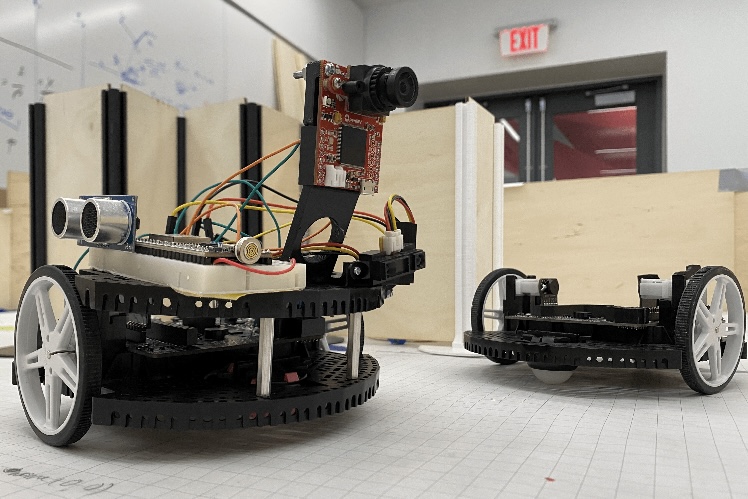
IR Based Mapping Robot
Autonomous Solar Panel Delivery Robot

